← Back to Projects
Firefighter Robot
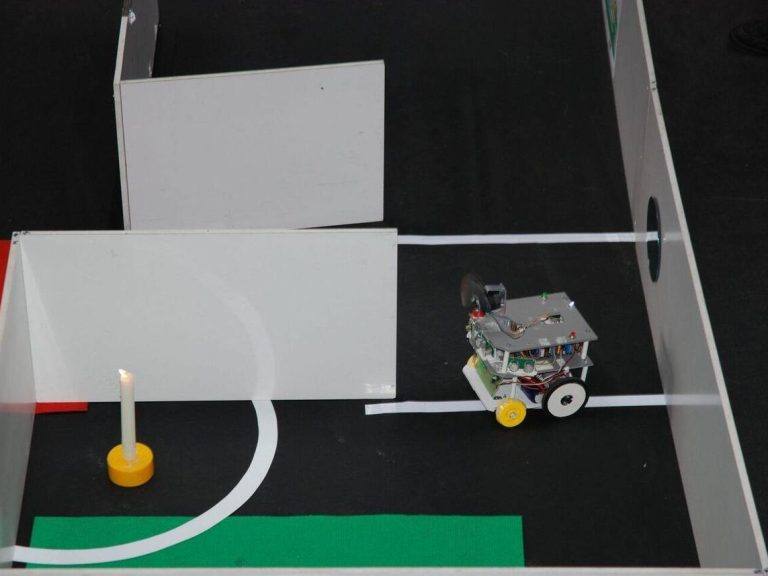
Autonomous robot that navigates a labyrinth, detects a flame, and extinguishes it
Goal
Build an autonomous robot able to navigate a maze, detect a flame, approach it safely, and extinguish it using an onboard fan/airflow mechanism.
Key Features
- Autonomous maze navigation with obstacle avoidance
- Flame detection using a light/flame sensor array
- Target approach logic to align with the flame source
- Extinguishing routine (fan-based) with verification (re-scan if flame persists)
- Failsafes: timeouts and retreat behaviors to avoid getting stuck
Technical Implementation
Hardware
Software
Algorithm Overview
- Explore: Follow corridors, avoid obstacles, and scan for flame intensity.
- Localize: Rotate and compare sensor readings to determine flame direction.
- Approach: Advance with small corrections while monitoring intensity.
- Extinguish: Activate the fan for a defined cycle, then re-check.
- Verify: If flame remains, repeat; otherwise, resume exploration or stop.
Challenges & Learnings
Tuning the navigation and approach behavior was the biggest challenge—especially balancing sensor noise and motor control to avoid oscillations. The project reinforced practical skills in sensor fusion, embedded C/C++ on Arduino, and designing clear state machines for robotics tasks.